
LiteLinear: Accelerating Video Generation DiT with Low-Rank Linear Compression

Practical inference acceleration for production video diffusion models on NVIDIA and AMD.
TL;DR
LiteLinear is a drop-in inference acceleration library that compresses linear layers in video generation Diffusion Transformers (DiTs) using calibration-aware low-rank decomposition combined with quantization. It targets all large linear operations in the transformer, both feed-forward networks (FFN) and attention projections (Q, K, V, O), without retraining the model.
- Proof-of-concept on LTX-2 FFN: 22.5% faster transformer compute, 11.5% peak memory reduction, 7.6% faster end-to-end inference.
LiteLinear repository: https://github.com/moonmath-ai/LiteLinear
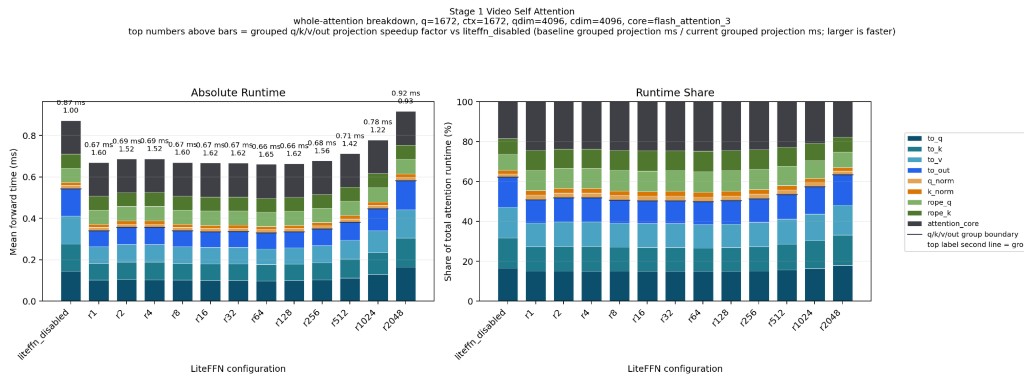
LiteLinear can increase the throughput of the projection layers by up to 1.6×, depending on the choice of rank. Choosing a lower rank causes slightly lower VRAM usage and minimal video degradation, if the rank is chosen carefully and adapted to the particular model. For LTX-2, we found that applying a slightly higher rank to the to_k projection in the first denoising stage preserves video quality best.
The Approach: Calibration-Aware Low-Rank Decomposition + Quantization
The projection layers make up a substantial part of the compute time spent on a forward pass of the transformer. After attention is optimized, they must be handled next in order to achieve a substantial speedup.
LiteLinear compresses each large linear layer by combining two ideas:
- Low-rank decomposition: approximate a large weight matrix
Was the product of two much smaller matricesAandB - Quantization: store the approximation error (remainder) in low precision (FP8 today; FP4 on the roadmap)
The key insight, borrowed from SVDQuant, is that a naive low-rank approximation misses which directions of W actually matter at runtime. LiteLinear corrects for this by collecting input statistics from real calibration data first, then decomposing in a space that reflects how the model is actually used.[1]
Why This Works on Any Linear Layer
The algorithm depends only on the shape of the weight matrix and a sample of inputs seen during normal operation. It has no dependence on the surrounding architecture, the specific model family, or the training procedure.
Any nn.Linear(in, out) layer in any DiT can be a target. LiteLinear ships with built-in support for FFN layers and attention Q/K/V/O projections, and exposes a simple API so you can target custom layer types in your own model.
How It Works (Step by Step)
Step 1: Collect Calibration Data
We run the model on a sample of real prompts and collect per-layer input statistics to characterize typical activation structure.
For each linear layer, we compute:
R = E[x * x^T]
For 2048-dimensional inputs, each autocorrelation matrix has 4 million entries. Across many
layers, memory grows quickly, so we compute R incrementally:
# Pseudocode for incremental autocorrelation
R_sum = zeros((dim, dim))
N = 0
for batch in calibration_data:
x = get_activations(batch) # Shape: [batch, seq_len, dim]
x_flat = x.reshape(-1, dim) # Flatten to [N_samples, dim]
R_sum += x_flat.T @ x_flat # Accumulate outer product
N += x_flat.shape[0]
R = R_sum / NStep 2: Compute Effective Weights
We use calibration statistics to transform the original weight matrix into a form that is easier to compress:
W_effective = W @ R^(1/2)This reweights columns by practical usage, improving how efficiently SVD can approximate the matrix for real workloads.
Step 3: Decompose
W_effective = U @ S @ V^TWe keep the top-r singular components:
W_low_rank_eff = U[:, :r] @ S[:r] @ V[:r, :]^TStep 4: Handle the Remainder
Remainder = W - W_low_rankThis residual is quantized to 4-bit or 8-bit formats.
Step 5: Inference
def forward(x):
# Low-rank path (full precision, small matrices)
y_lowrank = A @ (B @ x)
# Remainder path (quantized)
y_remainder = Q_quantized @ x
return y_lowrank + y_remainder + biasQuantization Options
Current production format on Hopper:
FP8 E4M3
- Bits: 8 (4 exponent, 3 mantissa)
- Range: approximately +/-448
- Pros: native H100 tensor core support, strong accuracy
- Cons: 2x memory versus FP4
Planned formats for LiteLinear on Blackwell and future Hopper support include NVFP4 E2M1 and MXFP4.
The Fun Part: Multiply-Free FP4
For non-native FP4 support, NVFP4's limited value set allows replacing floating-point multiplies with shift/add operations.
| FP4 Value | Operation | Instructions |
|---|---|---|
| 0 | return 0 | none |
| 0.5 | x >> 1 | 1 shift |
| 1 | x | identity |
| 1.5 | x + (x >> 1) | 1 shift, 1 add |
| 2 | x << 1 | 1 shift |
| 3 | (x << 1) + x | 1 shift, 1 add |
| 4 | x << 2 | 1 shift |
| 6 | (x << 2) + (x << 1) | 2 shifts, 1 add |
Proof of Concept: Accelerating LTX-2 19B on NVIDIA H100
We first applied LiteLinear to LTX-2, Lightricks' 19-billion parameter video DiT, targeting FFN layers. The results validate the approach and provide a concrete performance baseline.
LTX-2 is an excellent test bed because:
Results
Average Runtime
| Group | Transformer Mean (s) | Min (s) | Max (s) | Std (s) | Transformer % Faster | Decode Mean (s) | Save (s) | E2E Total (s) | E2E % Faster |
|---|---|---|---|---|---|---|---|---|---|
| baseline | 4.520 | 4.460 | 4.650 | 0.070 | 0.00% | 3.710 | 5.100 | 13.330 | 0.00% |
| litelinear | 3.500 | 3.490 | 3.520 | 0.010 | 22.57% | 3.710 | 5.100 | 12.310 | 7.65% |
Allocated VRAM Reduction
| Configuration | Average | Peak | Peak Relative to Baseline |
|---|---|---|---|
| Original (FP16) | 59,919.00 MB | 65,663.00 MB | 100% |
| r=64 | 44,517.00 MB | 58,433.00 MB | 89.0% |

Video Samples (baseline vs LiteLinear r=32 / r=64 / r=512)
Click a thumbnail to play the video.
| Baseline | LiteLinear r=32 | LiteLinear r=64 | LiteLinear r=512 |
|---|---|---|---|
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
Quality Measurements
PSNR average over different seeds, per prompt (dB)[2] (Higher is better; 20 dB corresponds to a mean squared error of roughly 10−2):
| Prompt | baseline vs r=32 | baseline vs r=64 | baseline vs r=512 |
|---|---|---|---|
| a-dramatic-underwater-scene-featuring-a-person-s | 19.823 | 19.822 | 20.413 |
| a-man-in-a-sleek-modern-jetpack-flying-upwards-t | 20.872 | 21.517 | 21.163 |
| a-serene-view-of-the-banks-of-the-rhine-river-sh | 20.277 | 20.208 | 19.735 |
| a-single-water-droplet-falls-from-a-height-movin | 27.827 | 27.375 | 30.680 |
| two-anthropomorphic-cats-boxing-in-a-well-lit-ar | 18.646 | 20.924 | 21.188 |
Prompt PSNR Summary
| Prompt | Total seeds | PSNR > 20 dB | PSNR > 17 dB |
|---|---|---|---|
| a-dramatic-underwater-scene-featuring-a-person-s | 30 | 10 | 30 |
| a-man-in-a-sleek-modern-jetpack-flying-upwards-t | 30 | 30 | 30 |
| a-serene-view-of-the-banks-of-the-rhine-river-sh | 30 | 20 | 30 |
| a-single-water-droplet-falls-from-a-height-movin | 30 | 30 | 30 |
| two-anthropomorphic-cats-boxing-in-a-well-lit-ar | 30 | 20 | 30 |
Performance of Synthetic Benchmark on Shapes Captured from LTX-Video
Multiplier columns are speedup ratios vs baseline linear (>1 faster, <1 slower).
Units:
- per-shape rows:
us TOTALrow:ms
Column glossary:
Cfg: FFN projection shape (w1= up-proj,w2= down-proj).M: flattened activation rows for that GEMM shape.Count: number of calls for that shape in the captured workload.Lin: baselinenn.Linearlatency.TE: Transformer Engine linear latency.PT: LiteLinear PyTorch path latency.CUDA: LiteLinear CUDA path latency.TE_x/PT_x/CUDA_x: speedup multiplier vs baseline linear (>1is faster,<1is slower).TOTAL: count-weighted aggregate across listed shapes.

| Cfg | M | Count | Lin | TE | PT | CUDA | TE_x | PT_x | CUDA_x |
|---|---|---|---|---|---|---|---|---|---|
| w2 | 1400 | 336 | 392 | 260 | 298 | 186 | 1.508x | 1.315x | 2.108x |
| w1 | 1400 | 336 | 378 | 273 | 301 | 182 | 1.385x | 1.256x | 2.077x |
| w2 | 2450 | 336 | 597 | 437 | 501 | 317 | 1.366x | 1.192x | 1.883x |
| w1 | 2450 | 336 | 562 | 455 | 511 | 302 | 1.235x | 1.100x | 1.861x |
| w2 | 5600 | 480 | 1213 | 994 | 1215 | 762 | 1.220x | 0.998x | 1.592x |
| w1 | 5600 | 480 | 1141 | 1097 | 1198 | 712 | 1.040x | 0.952x | 1.603x |
| w2 | 9800 | 144 | 2008 | 1763 | 2074 | 1261 | 1.139x | 0.968x | 1.592x |
| w1 | 9800 | 144 | 1946 | 1868 | 2042 | 1202 | 1.042x | 0.953x | 1.619x |
| w2 | 10850 | 336 | 2277 | 2110 | 2281 | 1395 | 1.079x | 0.998x | 1.632x |
| w1 | 10850 | 336 | 2035 | 2156 | 2215 | 1324 | 0.944x | 0.919x | 1.537x |
| w2 | 22400 | 144 | 4889 | 4506 | 4596 | 3018 | 1.085x | 1.064x | 1.620x |
| w1 | 22400 | 144 | 4714 | 4581 | 4471 | 2805 | 1.029x | 1.054x | 1.681x |
| w2 | 43400 | 144 | 9275 | 8285 | 8845 | 5772 | 1.119x | 1.049x | 1.607x |
| w1 | 43400 | 144 | 8847 | 8460 | 8669 | 5328 | 1.046x | 1.021x | 1.660x |
| TOTAL | - | 3840 | 7788 | 7158 | 7631 | 4744 | 1.088x | 1.021x | 1.642x |
Summary: LiteLinear CUDA implementation is 1.675x faster than torch.nn.Linear baseline across various shapes, captured from real video generation in LTX-Video. While the Linear implementation from Nvidia’s Transformer Engine is only 1.105x times faster.
Generalizing to Any DiT
The LTX-2 results are a proof of concept. The same technique applies to any Diffusion Transformer, because LiteLinear works at the nn.Linear level and requires no knowledge of the surrounding architecture. Candidates include:
- Other video DiTs, Wan2.1, CogVideoX, HunyuanVideo, Open-Sora, and others
- Image DiTs, Flux, SD3, PixArt
- World models and VLMs, any model with large feed-forward stacks
Beyond FFN: Attention Projections
LiteLinear targets not just FFN layers but also the Q, K, V, and O projection matrices inside attention. In LTX-2 (and most DiTs), these are Linear(dim, dim) layers, smaller than FFN projections but numerous. Compressing them adds incremental savings and, combined with FFN compression, can push total transformer runtime reduction above 30% on compatible hardware.
Attention projections are somewhat more sensitive to approximation error than FFN layers (since they participate directly in the softmax computation), so LiteLinear uses a more conservative default rank for them and allows independent rank control per layer type.
AMD GPU Support
LiteLinear supports AMD GPUs through ROCm, making it accessible to teams that operate AMD Instinct infrastructure (MI250, MI300, MI300X).
The core algorithm is calibration, SVD decomposition, and weight quantization. It is hardware-agnostic. The low-rank linear forward pass uses standard PyTorch operations that run on any backend. The FP8 remainder path uses ROCm's native FP8 tensor core support available on MI300-series hardware.
Only RoCM 7.2.0 and above is supported.
AMD Acceleration Results
Synthetic Benchmark Results:
Cfg M Count | Lin ROCM | ROCM_x
---------------------------------------------
w2 1400 336 | 312 265 | 1.177x
w1 1400 336 | 325 291 | 1.117x
w2 2450 336 | 536 411 | 1.304x
w1 2450 336 | 545 435 | 1.253x
w2 5600 480 | 1183 865 | 1.367x
w1 5600 480 | 1221 877 | 1.392x
w2 9800 144 | 2080 1507 | 1.380x
w1 9800 144 | 2052 1499 | 1.369x
w2 10850 336 | 2478 1626 | 1.523x
w1 10850 336 | 2345 1648 | 1.423x
w2 22400 144 | 4958 3374 | 1.469x
w1 22400 144 | 4976 3391 | 1.468x
w2 43400 144 | 9034 6547 | 1.380x
w1 43400 144 | 9655 6548 | 1.474x
---------------------------------------------
TOTAL 3840 | 8068 5700 | 1.415xResult for LTX1 on 1280x720, 81 frames:
- 29% faster for FFN
- 6% faster E2E
Developer Guide
Installation
Pick the pre-built wheel that matches your Python version and GPU stack:
# 1) Clone the repository
git clone https://github.com/moonmath-ai/LiteLinear.git
cd LiteLinear
# 2) Install from a prebuilt wheel in install/
# Pick the wheel matching your environment.
# NVIDIA (CUDA 12.8), Python 3.10
pip install install/lite_linear-0.1.0+cu128-cp310-cp310-linux_x86_64.whl
# NVIDIA (CUDA 12.8), Python 3.12
pip install install/lite_linear-0.1.0+cu128-cp312-cp312-linux_x86_64.whl
# AMD (ROCm 7), Python 3.10
pip install install/lite_linear-0.1.0+rocm7-cp310-cp310-linux_x86_64.whl
# AMD (ROCm 7), Python 3.12
pip install install/lite_linear-0.1.0+rocm7-cp312-cp312-linux_x86_64.whlRuntime dependencies (torch, safetensors) must be installed separately. The package is imported as lite_linear.
Quickstart: Integrate and Compress a Model
Replace nn.Linear with LiteLinear at model construction time. Decomposition (W ≈ A @ B + FP8(Q)), caching, and reload on subsequent runs all happen automatically when model.eval() is called, with no manual calibration loop required.
import torch
from lite_linear import LiteLinear
# At model construction, swap nn.Linear for LiteLinear (drop-in replacement)
# For standard output projections (e.g. FFN w2):
self.proj = LiteLinear(inner_dim, out_dim, bias=True, rank=64)
# For diffusers-style activations that hold an internal .proj (GEGLU / GELU):
LiteLinear.replace_activation_proj_(act_fn) # in-place; returns True if replaced
# Load weights and move to CUDA as usual
model.load_state_dict(checkpoint)
model.cuda()
# One-time decomposition for all LiteLinear instances in the process.
# Factors are written to the cache directory and reloaded on subsequent runs.
model.eval()Cache lookup order: $LITELINEAR_CACHE/lr_data/ → $HF_HOME/lr_data/ → <script_dir>/.cache/litelinear/lr_data/. Delete the .safetensors cache file to force regeneration after a checkpoint update.
Loading a Pre-Compressed Model
from lite_linear import apply_lowrank_factors_to_transformer, load_lowrank_factors
# Load your model skeleton as usual
transformer = load_your_dit_model(...)
# Load pre-compressed factors from disk
factors, metadata = load_lowrank_factors("./my_model_litelinear/factors.safetensors")
print(f"rank={metadata.get('rank')}, calibrated={metadata.get('with_r')}")
# Patch the transformer in-place, no recomputation needed
apply_lowrank_factors_to_transformer(
transformer,
factors=factors,
which=("w1", "w2"), # FFN projections to restore ("w1", "w2", or both)
quantize_q=True,
)Targeting Custom Layer Types
iter_ltx_ffn_linears enumerates the FFN w1/w2 projections inside LTX-Video-style transformer_blocks. For any other architecture, swap nn.Linear for LiteLinear directly, copy the existing weights over, then let model.eval() handle decomposition:
import torch
from lite_linear import LiteLinear, iter_ltx_ffn_linears
# Inspect available FFN layer references in an LTX-style transformer
for ref, module in iter_ltx_ffn_linears(transformer):
# ref.name → e.g. "transformer_blocks.3.ff.net.2"
# ref.part → "w1" or "w2"
# ref.block_idx → block index
print(ref.name, ref.part, ref.block_idx)
# For a custom architecture: replace any nn.Linear with LiteLinear
lite = LiteLinear(
module.in_features,
module.out_features,
bias=module.bias is not None,
rank=64,
device=module.weight.device,
dtype=module.weight.dtype,
)
with torch.no_grad():
lite.weight.copy_(module.weight)
if module.bias is not None:
lite.bias.copy_(module.bias)
parent.target_layer = lite
# model.eval() triggers decomposition for all registered LiteLinear instances
model.eval()Rank Selection Guidelines
| Use case | Recommended rank |
|---|---|
| Maximum speed, modest quality | 32 |
| Balanced speed + quality | 64 |
| Near-lossless compression | 256, 512 |
| Per-layer adaptive (auto) | rank="auto" (planned) |
Hardware Requirements
| Platform | FP8 | FP4 |
|---|---|---|
| NVIDIA H100 (Hopper) | Yes | Planned (multiply-free) |
| NVIDIA B100/B200 (Blackwell) | Yes | Yes (native) |
| AMD MI300X (ROCm) | Yes | Planned |
Credit and Acknowledgments
LiteLinear builds on SVDQuant. Their work introduced the theoretical combination of low-rank decomposition with quantized remainders and calibration-aware effective weights. Our contribution is in taking those ideas to production: efficient CUDA/ROCm kernels, a scalable calibration pipeline, FP8 support, and generalization across layer types and model architectures.
We also thank:
- The Lightricks team for open-sourcing LTX-2
- The Flash Attention authors for pioneering efficient attention, which makes the remaining linear bottlenecks all the more important to address
References
- LiteLinear repository: https://github.com/moonmath-ai/LiteLinear
- SVDQuant Paper: https://arxiv.org/abs/2411.05007
- LTX-2: https://huggingface.co/Lightricks/LTX-2
- LTX docs: https://docs.ltx.video/welcome
Appendix: Mathematical Background
Singular Value Decomposition
SVD factorizes any matrix M into:
M = U @ S @ V^TU: orthogonal, columns are left singular vectorsS: diagonal, singular values sorted descendingV: orthogonal, columns are right singular vectors
Rapid decay of singular values means the matrix has low effective rank and can be well approximated with a small r.
Why Calibration-Aware Decomposition?
A naive SVD of W treats all input dimensions equally. But in practice, some dimensions are rarely activated. The autocorrelation matrix R = E[x x^T] captures which directions are important. Transforming W → W @ R^(1/2) down-weights unimportant directions before SVD, making the rank-r truncation much more accurate under real input distributions.
The square root is used because it "whitens" the input: transforming x → R^(-1/2) x gives identity covariance, so SVD operates in a normalized space where each component captures an equal share of variance.
Talk to us: research@moonmath.ai